|
|
||||||||||||||||||||||||||
|
||||||||||||||||||||||||||
Bei der BMW Lenkung wird bei einigen Modellen die so genannte Aktivlenkung eingesetzt (auch: AFS - Active Front Steering). Es handelt sich hierbei um ein intelligentes fahrdynamisches Lenksystem. Eine Probefahrt hat den Autor von dieser völlig anderen Lenkung überzeugt. Bei der Aktivlenkung handelt es sich um eine Technologie mit zwei wesentlichen Merkmalen:
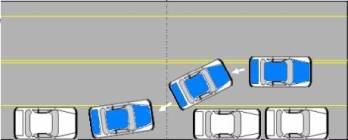
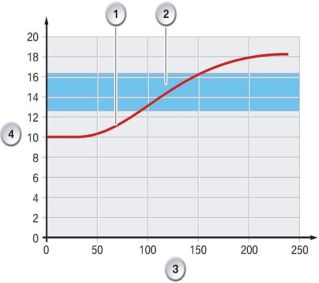
Bei hohen Geschwindigkeiten ist die Lenkung indirekt, bei langsamer Fahrt ist die Lenkung direkt ausgelegt. 2) ESP LenkregulierungDurch die Verbindung der Lenkung mit dem ESP (= Elektronisches Stabilitäts-Programm, bei BMW DSC = Dynamic Stability Control genannt) stabilisiert die Aktivlenkung das Fahrzeug in schwierigen Fahrsituationen (schlechter Straßenzustand oder starker Wind). Wenn zum Beispiel die Gefahr besteht, dass das Heck des Fahrzeugs in einer Kurve auf nasser Straße ausbricht, beeinflusst diese Technologie unbemerkt die Position der Räder und somit die Fahrtrichtung. Der Fahrer kann dabei ganz normal durch die Kurve steuern.
|
||||||||||||||||||||||||||
 |
|
Die oben beschriebenen Merkmale ermöglichen es dem Fahrzeug, Fahrsituationen zu erkennen und das Lenkverhalten für den Fahrer anzupassen.
|
|
1
Auslegung der Aktivlenkung
2
Konventionelle Auslegung (blau)
3
Fahrgeschwindigkeit
4
Übersetzung
|
Beschreibung der Technik
Das elektronisch geregelte Lenksystem unterstützt den Fahrer zum einen über die
-
Momentunterstützung der Servolenkung und zum anderen mit einer
-
variablen Lenkübersetzung
Das Kernstück der Aktivlenkung ist die Aktivlenkungs-Stelleinheit. Diese ist im Lenkgetriebe zwischen Servotronic-Ventil und Zahnstange eingebaut. Die Stelleinheit besteht aus einem Elektromotor und einem Überlagerungsgetriebe.
|
|
1 = Sonnenrad
2 = Planetenrad 3 = Planetenradträger 4 = Hohlrad vereinfache Darstellung eines Planetengetriebes |
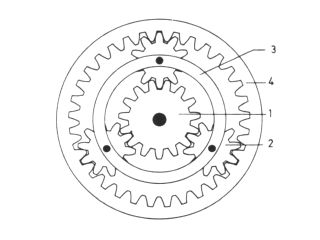
Das Überlagerungsgetriebe besteht im Wesentlichen, aus den Hauptkomponenten Schneckenrad, zwei Planetenradträgern und drei Stufenplaneten (siehe Bilder unten). Die Stufenplaneten stellen die mechanische Verbindung zwischen dem oberen (Welle des Servotronic-Ventils) und dem unteren Sonnenrad her.
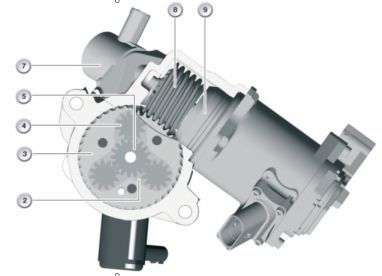 |
2 Planetenradträger 3 Schneckenrad 4 Stufenplanet 5 Sonnenrad (Welle) 7 Sicherheitssperre 8 Schneckentrieb 9 Elektromotor Aktivlenkungs-Stelleinheit |
|
|
In Abhängigkeit von der Fahrzeuggeschwindigkeit greift ein Elektromotor
über einen Schneckentrieb in das Planetengetriebe ein. So erzeugt das
Lenksystem in bestimmten Fahrsituationen einen zusätzlichen oder umgekehrt
einen reduzierten Lenkwinkel an den Vorderrädern der durch Änderung des
Übersetzungsverhältnisses an der Lenkspindel (= d) erreicht wird. In
kritischen Situationen kann das Lenksystem den vom Fahrer eingeschlagenen
Lenkeinschlag der Räder gezielt verändern und das Fahrzeug damit schneller
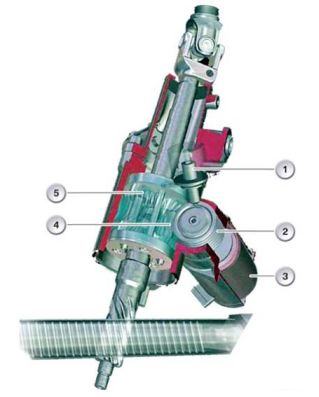
als der Fahrer stabilisieren. 1 Sperre 2 Schneckentrieb 3 Elektromotor 4 Schneckenrad 5 Planetengetriebe erweiterte Darstellung des Getriebes |
Die Drehrichtung, die Drehzahl und die Dauer der Motorbewegung werden von einem angebauten Motorwinkelsensor überwacht, um den Lenkwinkel zu berechnen. Bei einer vom Elektromotor erzeugten Bewegung des Schneckenrades umkreisen die Stufenplaneten die beiden Sonnenräder. Aufgrund der Zähnezahldifferenz der Stufenplaneten entsteht eine relative Drehbewegung der Sonnenräder (Lenkspindelbewegung = Lenkbewegung) zueinander. Wäre die Zähnezahl der Sonnenräder gleich würden die Planetenräder ohne Kraftübertragung um beide Sonnenräder umlaufen. Die Lenkrad- und Schneckenbewegung (erzeugt durch den Elektromotor) wird am unteren Sonnerad zusammengeführt (Drehzahldifferenz zwischen oberen und unteren Planetensatz) und über das Antriebsritzel auf die Zahnstange übertragen.
Der Lenkwinkel fällt bei einer gleichsinnigen
Bewegung von Schneckenrad und oberem Sonnenrad kleiner (negativ)
aus. Bei einer gegensinnigen Bewegung fällt der wirksame Lenkwinkel
größer (positiv) aus.
Als zusätzliche Bauteile zur herkömmlichen
Servotronic werden neben der Stelleinheit ein
Summenlenkwinkelsensor, das Aktivlenkungssteuergerät, das
Sicherheits- und Gatewaymodul (SGM) und eine veränderte
Hydraulikpumpe benötigt.
|
Eingangs
- und Ausgangssignale bei der Aktivlenkung
|
|
|
1 Raddrehzahlsensoren 2 Bremsbelagverschleißsensoren 3 Bremslichtschalter 4 Bremsflüssigkeits-Niveauschalter 5 DSC-Taste 6 DSC-Sensor1 7 DSC-Sensor 2 8 Summen-Lenkwinkelsensor 9 Lenkwinkelsensor PT-CAN (Powertrain-CAN) 10 Motorlagesensor der Stelleinheit F-CAN (Fahrwerks-CAN) |
11 Instrumentenkombination (byte-flight: schneller Direktbus) 12 DSC-Steuergerät K-CAN (Karosserie-CAN) 13 AFS Aktivlenkungs-Steuergerät 14 SGM-Steuergerät 15 DME-Steuergerät 16 Sperre der Stelleinheit 17 Stelleinheit-Aktivlenkung 18 Servotronic-Ventil 19 BMW Diagnosesystem 20 Hydraulikpumpe mit ECO-Ventil |

Der Summenlenkwinkelsensor
Der Summenlenkwinkelsensor erfasst den Drehwinkel des Lenkradritzels und somit den Radeinschlag (bzw. den Lenkwinkel) des Fahrzeugs. Er arbeitet nach dem magnetoresistiven Prinzip und ist nicht einzeln austauschbar.
Das Sicherheits-und Gatewaymodul (SGM)
Erhält das SGM nach 100 ms keine gültige Botschaft vom Aktivlenkungssteuergerät, so arbeitet es mit einer fahrgeschwindigkeitsabhängigen Ersatzkennlinie. Diese stellt ausreichende Lenkeigenschaften für das passive Lenksystem sicher.
Die Hydraulikpumpe
Die vektorielle Überlagerung der Stellgeschwindigkeiten des Fahrers und des Stellmotors kann – wenn beide Stellbewegungen gleichgerichtet sind – in bestimmten Fahrsituationen zu einer Stellanforderung mit deutlich höheren Zahnstangenverschiebegeschwindigkeiten als bei konventionellen Lenkungen führen. Diese Situationen erfordert dementsprechend auch einen höheren Ölvolumenstrom. Da nicht dauernd ein hoher Druck erforderlich ist, wird eine Flügelzellenpumpe mit variablem druckseitigen Volumenstromregler verwendet.
Zusammenfassung der Vorteile des Systems
-
Das Lenksystem Aktivlenkung unterstützt den Fahrzeugführer bei Lenkbewegungen und bringt Zusatzlenkwinkel in Abhängigkeit von fahrdynamischen Größen aktiv in die Lenkung ein.
-
Beim Einparken sind nur geringe Lenkradbewegungen nötig, um große Radeinschläge zu bewirken. Es werden von Lenkradanschlag bis Lenkradanschlag weniger als 2 Lenkradumdrehungen benötigt.
-
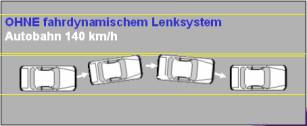
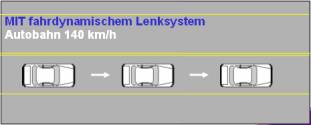
Bei hohen Geschwindigkeiten, etwa auf der Autobahn, wird die Lenkübersetzung zunehmend indirekter bis hin zum Niveau konventioneller Lenkungen und sogar darüber hinaus. Das gleichzeitig ansteigende Lenkmomentniveau verhindert ungewollte Lenkbewegungen und der Fahrer spürt den Gewinn an Fahrstabilität.
-
Ungewollte Fahrzeugbewegungen, z.B. Übersteuern, werden vom Lenksystem Aktivlenkung ausgeglichen, ohne dass der Fahrer korrigierend eingreifen muss, um die gewünschte Spur zu halten.
-
Die Eingriffsschwelle der DSC liegt höher als die Eingriffsschwelle der Aktivlenkung. Wenn ein Übersteuern des Fahrzeugs erkannt wird, so greift zuerst die Aktivlenkung ein, um das Fahrzeug zu stabilisieren. Erst wenn das Stabilisieren über die Lenkung nicht ausreicht, greift DSC ein
Quelle: BMW, Akademiebericht Dillingen
Weitere passende Berichte: Servotronic | EPS | Drehmomentsensor | ESP | Servolenkung
Autor: Johannes Wiesinger
bearbeitet: 29.12.2022
| Impressum, Copyright | |||||