Jeder Kfz-Mechatroniker wird in seiner Ausbildung mit dem
EVA-Prinzip konfrontiert:
Allen elektronischen Systemen gemeinsam
ist, dass sie nach dem EVA-Prinzip der Informationsverarbeitung
arbeiten.
So auch die elektronischen Systeme im
Kraftfahrzeug.
Übersicht EVA-Prinzip:
Eingabe
Verarbeitung
Ausbgabe
Information
Ansteuerung
Bei der Eingabe handelt es sich
um
Signalglieder (Sensoren), die auch als Geber oder
Fühler bezeichnet werden.
Die Verarbeitung der
elektrischen Signale erfolgt üblicherweise durch
Steuerglieder (Steuergerät), also einen zentralen
Mikrocomputerder (CPU), der mit Hilfe von einprogrammierten
mathematischen Formeln und Kennfeldern (Datenbanken) die
Entscheidungen trifft und die Aktoren ansteuert.
Auf der Ausgabe befinden sich
die
Stellglieder (Aktoren), die die Befehle des
Steuergerätes umsetzen.
Sensoren und Aktoren können, je nach Einsatz
analog, binär oder digital arbeiten. Bei den Sensoren unterscheidet
man
aktive und passive
Sensoren.
Da hier von Eingabe (E), Verarbeitung (V) und
Ausgabe (A) gesprochen wird, nennt man dieses Prinzip auch E-V-A
Prinzip.
EVA-Prinzip am Beispiel der Leerlaufregelung
Begriff
Signalglied
Steuerglied
Stellglied
gehört zu
Eingabe
Verarbeitung
Ausgabe
Bauteil
Sensor, Geber, Fühler
Steuergerät (ECU, CPU)
Aktor, Aktuator, Steller
Kurz-
beschreibung
Die Sensoren erfassen aktuelle Prozessdaten. Dies
können analoge Daten (z.B. Temperaturfühler), digitale Daten (z.B.
Türschalter) oder Frequenzen (z.B. Drehzahlfühler) sein.
Das Steuergerät wertet die Daten aus. Wenn
erforderlich, veranlasst es aufgrund der eingegangenen Daten eine Anpassung
der angeschlossenen Aktoren.
Die Aktorik nimmt digitale (z.B.
Glühlampe) oder analoge Steuerbefehle (z.B. Stellmotor) entgegen.
am Beispiel Leerlaufregelung
Drehzahlgeber Kurbelwelle, Temperaturfühler
Motorsteuergerät
Leerlaufstellmotor
Die
Signalglieder (Sensoren)
Temperaturfühler
(NTC) des Kühlwassers und
Induktivgeber
der Kurbelwelle nehmen die physikalische Größen Temperatur und Drehzahl
auf und wandeln diese in brauchbare Eingangssignale für die Steuerglieder
in Form von Spannungen um.
Da diese Signale in das
Steuergerät hineingehen, spricht man auch von der
Eingabe.
Vergleichbar mit einem
Computer wäre das die Tastatur oder die Maus.
Im Steuergerät müssen diese Informationen zunächst aufbereitet und verstärkt
werden, d.h. aus den analogen Drehzahl- und Temperatursignalen müssen
digitale Signale geformt werden. Danach werden diese Signale (Istwerte) auf
Plausibilität geprüft und mit abgespeicherten Sollwerten verglichen (Verarbeitung).
Die Werte für die Drehzahl und die Temperatur sind in sogenannten
Kennfeldern abgelegt, was einer Datenbank gleichkommt. Aus den beiden
Informationen Drehzahl und Temperatur wird nun die richtige Drehzahl mit
Hilfe des Kennfeldes ermittelt.
Das Steuergerät gibt ein Signal an das Stellglied oder anders gesagt an den
Aktor (Ausgabe).
In unserem Fall ist dies ein Leerlaufsteller. Das Motorsteuergerät
taktet diesen Schrittmotor in einem bestimmten prozentualen Verhältnis an
(einschalten und ausschalten). Der Motor lässt nun ein bisschen mehr
Luft um die Drosselklappe herum strömen, was eine höhere Drehzahl bewirkt.
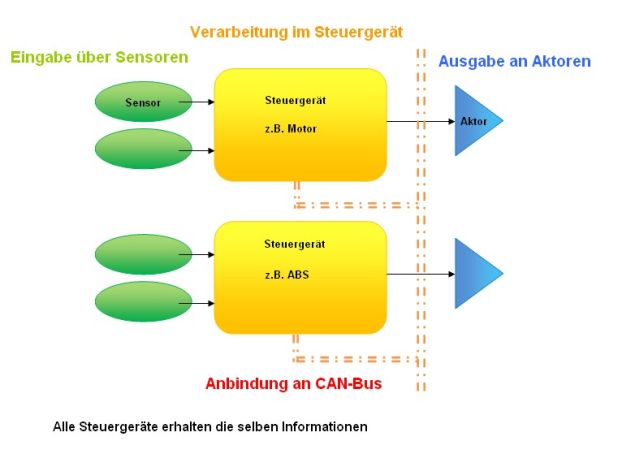
Grundsätzlicher
Aufbau des EVA-Prinzips mit Busanbindung
E-V-A Prinzip Busanbindung
In den Fahrzeugen erfolgt
die
Verarbeitung der Daten im Prinzip nur noch digital. Ein Mikroprozessor
(CPU = Central Processing Unit) arbeitet die eingehenden Daten ab und
schaltet die angeschlossenen Aktoren.
Damit der Mikrocontroller die Eingangssignale richtig verstehen kann,
müssen diese in digitale Spannungen und/oder Frequenzen übersetzt werden.
Diese Aufgabe übernimmt ein vorgeschalteter Signalwandler.
Genauso
müssen die von der CPU veranlassten Steuerbefehle zu Signalen aufbereitet
werden, die von den Aktoren verstanden werden können.
Dazu dient eine Endstufe, die zwischen CPU und Aktorik geschaltet ist.
Diese muss genügend Leistung für die angeschlossenen Aktoren (z.B.
Stellmotoren) liefern können.
Moderne Kraftfahrzeuge besitzen ein Vielzahl an
Steuergeräten für die unterschiedlichsten Zwecke (z.B. für ABS,
Zentralverriegelung, Motormanagement usw.). Der Einsatz von Bussystemen
wurde erforderlich. Auf diese Weise kann ein Steuergerät mit jedem anderen
angeschlossenen Steuergerät bedarfsgerecht über nur einen Bus mit zwei
Leitungen kommunizieren.
Der Informationsfluss
geht meist wie folgt vonstatten:
Signalerzeugungdurch Sensoren
Signalumformung
durch Impulsumformer (IF), Analog-Digitalwandler (A/D)
Daten- bzw. Signalverarbeitung
durch Mikrocomputer
Datenübertragung
durch Multiplexer, CAN-Bus
Leistungsverstärkung der Ausgangssignale
durch Endstufen
Informationsumsetzung
durch Aktoren
näher erklärt:
Signalerzeugung
Sensoren
erfassen Informationen wie z.B. Kühlwassertemperatur,
Kurbelwellendrehzahl, Drosselklappenstellung und erzeugen elektrische
Signale (häufig in analoger oder binärer Form)
Signalumformung
Analoge Signale müssen erst "passend" für das
Steuergerät gemacht werden: aus dem Induktivgebersignal wird ein digitales
Rechtecksignal geformt; im Steuergerät befinden sich die elektronischen
Bauteile Impulsumformer und A/D-Wandler
Daten-
bzw. Signalverarbeitung
die vorliegenden binären Ist-Daten werden mit
Soll-Daten, die in sogenannten Kennfeldern gespeichert sind verglichen und
ausgewertet
Datenübertragung
Datenaustausch zwischen verschiedenen Steuergeräten
über
CAN-Bus und Multiplexer;
Datentransport zur Leistungsstufe über normale Leitungen
Leistungsverstärkung
die Schaltsignale müssen durch Leistungstransistoren
(Endstufen) für die Aktoren (Einspritzventil, Stellmotor) erst entsprechend
verstärkt werden
Informationsumsetzung
die Aktoren setzen die Befehle des Steuergeräts um
(längeres Einspritzen, früher zünden)
CAN-Bus
(Controller Area Network)
Eine Bus-Verbindung ist eine Verdrahtung, bei der Daten übertragen werden.
Alle Stationen sind gleichzeitig über eine Leitung angeschlossen und
gleichberechtigt. Der Aufwand an Kontakten und Kabeln wird erheblich
reduziert. Zusätzlich können die Funktionen ohne wesentliche Mehrkosten
umfassend überwacht und neue Systemkonfigurationen gestaltet werden.
Das Buskonzept ermöglicht die
serielle Verbindung von Komponenten der Karosserie-, Komfort-, Getriebe-
und Motorelektronik. Diese Komponenten können zu einem Gesamtsystem
verdrahtet werden. Es können aber auch Teilsysteme realisiert werden, die
lediglich kritische Bereiche wie lnstrumententafel oder Türen umfassen.
Bus-Systeme lassen sich in ihrem Datenaustausch sehr leistungsfähig und
flexibel gestalten.
Außerdem
bieten seriell aufgebaute Bus-Systeme gegenüber konventioneller
Verdrahtung zwei wesentliche Vorteile höhere Übertragungssicherheit
und geringere Kosten.
Dazu gibt es 2 Erklärvideos, die auch
sehr schön im Unterricht eingesetzt werden können. Die Basis ist jeweils eine
Flash Animation von Harald Huppertz (www.kfz-tech.de).