Navigation (lat.) i.w.S. das ´Führen
eines Wasser-, Luft- oder Raumfahrzeugs von einem Ausgangsort auf bestimmtem
Wege zu einem Zielort, einschließlich der dazu erforderlichen Mess- und
Rechenvorgänge. I.e.S. die Planung und Überwachung der Fahrzeugbewegung in
möglichst optimale Weise.
N A V I G A T I O N =
Ortung
GPS
Koppelnavigation
Digitale Straßenkarte
+
Routenberechnung
Zieleingabe
Kriterien
Digitale Straßenkarte
+
Zielführung
Sprachausgabe
Piktogramme
Digitale Straßenkarte
Hier nun die Erklärung der wichtigsten Begriffe aus der
Kfz-Navigation:
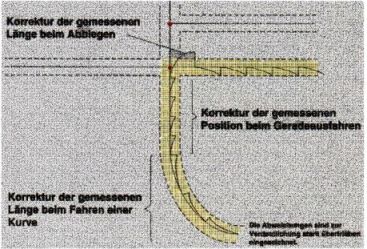
Das
Fahrzeugnavigationssystem bestimmt ausgehend von einer bekannten
Anfangsposition die aktuelle Position durch Addition von Wegstücken.
Aus den Signalen des Drehwinkelsensors sowie des Tacho- oder
Radsensors bestimmt der Navigationsrechner die zurückgelegte Wegstrecke
sowie die Fahrtrichtungsänderungen und erkennt den Streckenverlauf. Aus
diesem Zusammenspiel ergibt sich die Koppelortung.
Nachteil der Koppelortung
Bei der klassischen
Koppelortung durch Addition von Wegstrecken addieren sich Messfehler
und die Unsicherheit der Positionsbestimmung wächst mit der Zeit. Diese
Fehler müssen durch Kartenvergleich oder erneutes Aufsetzen der Position
korrigiert werden.
GPS
Global Positioning System
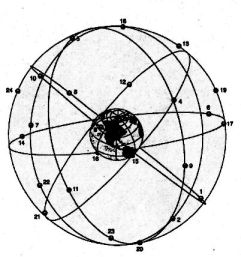
Das GPS-Verfahren basiert
auf der Entfernungsbestimmung durch Uhrenvergleich von 24 Satelliten auf 6
Kreisbahnen (mit je 4 Satelliten in 60° Abständen, Bahnhöhe 20180 km,
Erdumkreisung in ca. 12 Stunden). Signalempfang ist weltweit, zu jeder
Zeit, unabhängig vom Wetter und unabhängig von der Höhe. Sendefrequenz: f1
= 1575,42 MHz, f2 = 1227,6 MHz. Die Radiowellen verhalten sich ähnlich wie
Lichtstrahlen. Das bedeutet es muss Sichtverbindung zwischen Satellit und
Empfänger bestehen.
Video zum Galileo Satelliten Navigationssystem
(ca. 9 min)
Bestimmung
der Position
Nach Inbetriebnahme versucht das Navigationssystem
selbständig die Satellitensignale zu empfangen. Die GPS-Ortung beruht
auf direkten Entfernungsmessungen im Einweglaufzeitmessverfahren. Dazu
senden die GPS-Satelliten 50 mal pro Sekunde Daten über Bahn, Zeit und
Identifikation mit einer Sendeleistung ca. 50 Watt zur Erde. Durch die
Laufzeit der Signale kann die Entfernung zum Satelliten und damit die
eigene Position bestimmt werden. Für die Bestimmung der eigenen
Position (Ortung) ist der Empfang von mindestens drei Satelliten
erforderlich. Bei Empfang von vier oder mehr Satelliten kann nicht nur
die Position sondern auch die Höhenlage bestimmt werden.
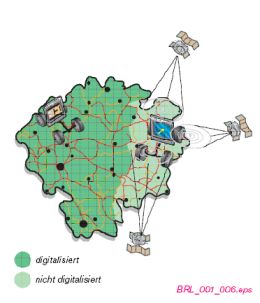
Map-Matching
Mehrmals pro Sekunde führt der
Navigationsrechner ein „Map-Matching“ durch; die auf der CD-ROM (DVD,
Speicherkarte...) gespeicherte Straßenkarte wird mit dem gefahrenen
Streckenverlauf verglichen. Dadurch wird die Genauigkeit innerhalb von
digitalisierten Ortschaften bis auf ± 5 m und auf Landstraßen oder
Autobahnen bis auf ± 50 m erhöht.
In nicht digitalisierten Gebieten ist
ein Map-Matching nicht möglich, die Navigation
erfolgt ausschließlich über Satellitendaten, die Entfernung wird in
Luftlinienentfernung und Richtung zum Ziel angezeigt. Im Display erscheint
die Anzeige „OFF-ROAD" (abseits der digitalisierten Straße).
Kleines Fazit
Erst die Kombination aus Koppelortung
und GPS-Ortung macht ein Navigationssystem "unschlagbar". Bei der
Koppelortung addieren sich zwar kleine Fehler, sie ist aber unabhängig
vom Satellitenempfang. Fehler können durch Map-Matching
ausgeglichen werden. GPS ist weltweit verfügbar und arbeitet sehr
genau, Empfangsstörungen sind hier manchmal ein Handicap. Die
Koppelortung wird durch das GPS kontrolliert.
+
Festeingebaute Geräte verfügen über
diese Kombination, während mobile Geräte und Handys nur über GPS verfügen.
Wer viel unterwegs ist, ist in der Regel mit einem Einbaugerät besser
dran. Gelegenheitsfahrern reicht meist ein mobiles "Navi" völlig aus.

 +
+
